
We propose to build and operate a fully functional micromobility research testbed, comprising of dockless e-scooter vehicles, on the UTSA Main and Downtown campuses. This will enable us to (i) offer loanable/rentable micromobility vehicles, which are customized for data collection, to the university population, and (ii) setup back-end services to facilitate vehicle fleet management, remote vehicle sensor customization and research data collection, archival and sharing.
Hardware and Embedded Systems Software
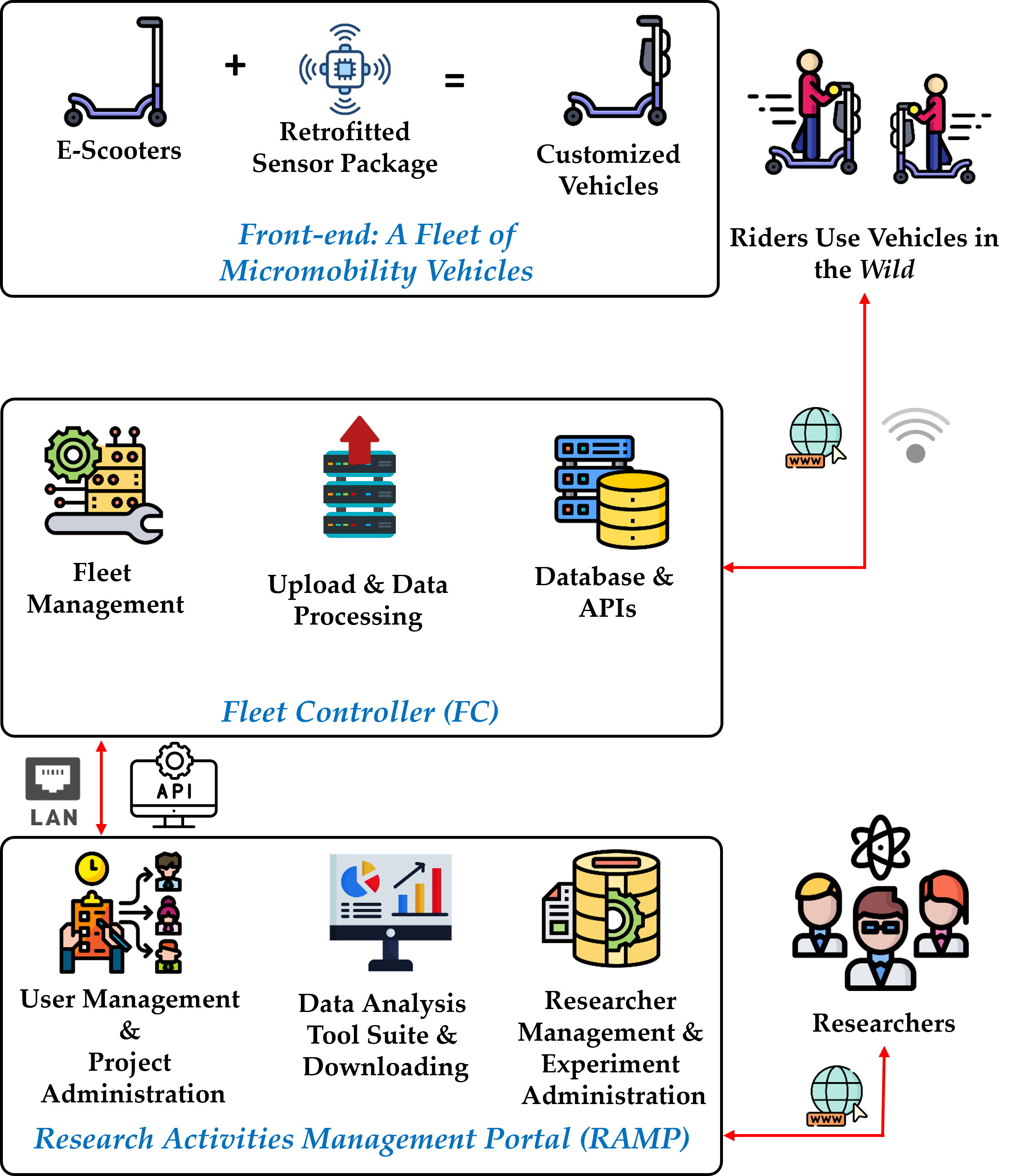
Acquisition: Several different hardware needs to be acquired for development and deployment of ScooterLab. First, a fleet of popular off-the-shelf micromobility vehicles, more specifically dock-less two-wheeled chargeable electric scooters, will be purchased. We will prototype and test few different e-scooter makes and models before ordering an entire fleet. To control the e-scooter renting and riding functionalities a Raspberry Pi Compute Module along with a custom expansion board based unit will be installed to each scooter which will act as the Wireless Base Station Computer (WBSC). Accordingly, the custom expansion board will integrate an extensive suite of sensors (such as motion, orientation, location, acoustic, pressure, and light sensors) and a set of actuators (such electronic relays, and audio and light based actuators). to enable wireless communication with the Fleet Controller. In addition to this, we also plan to acquire several high-end data servers. One will be used as the Fleet Controller (with high-speed (1Gbps or more) network connectivity). Another server will host the Research Activities Management Portal, which will require very high computational capabilities (with high end CPUs, GPUs and PCIe accelerator cards with Tensor cores, and a fast SSD-based data storage pool). Both of these servers will be hosted in UTSA's Research Data Center. A third back-up server will be employed for data loss prevention and will be hosted in the UTSA Downtown campus.
Development and Vehicle Modifications: Significant hardware development tasks will be done as part of designing the custom expansion board for Raspberry Pi Compute Module, and interfacing both to form the WBSC. The first developmental task will be to study and tap in to the riding controls of the e-scooter, such as acceleration and top speed. This will allow us (via the WBSC) to activate the e-scooters when a rider unlocks it for a trip (through a smartphone application), and deactivate the e-scooter after the trip ends. The second developmental task of retrofitting the WBSC and off-board sensors and actuators will also require careful hardware engineering and modifications, so as not to interfere with the e-scooter's design and mechanics. If deemed necessary, we will also apply for safety certification of the customized e-scooters from regulative agencies, such as the Texas Department of Public Safety.
Testing and Deployment: We will follow a waterfall development and testing model, where all the functional requirements and features will be defined before development and the customized hardware will be tested at the end. For any iterative changes (such as when a new or different batch of e-scooters are purchased), the hardware development and testing will start from the beginning. Development will be followed by three rounds of testing. The first round will be done in-house, where all functional requirements and features will be verified. The second round will be done in-field albeit in a restricted fashion, such as by the PIs and developers involved. The third round will be done in-field without any restrictions, except that the number of vehicles being tested will be gradually increased. After three rounds of testing, the vehicles will be ready for deployment whenever a new research experiment is sanctioned.
Command & Control Software
Development: Software development will be required in three areas: vehicles, Fleet Controller, and Research Activities Management Portal (RAMP). Software on the vehicle (deployed in WBSC) will be responsible for loaning/renting and riding functionalities, sensing, and actuation using customized hardware. The Fleet Controller software (deployed on one of the data servers) will be responsible for remotely overseeing vehicle control, sensing, and actuation. It will also be responsible for tracking scooter loans or ride pricing and billing (in case of rentals), through communication with riders' smartphone over cellular/Wi-Fi network. Fleet Controller will also help in vehicle maintenance and planning logistics, such as identifying charge-drained/unused scooters and determining strategic locations for deploying fully charged scooters across the testbed area. The Fleet Controller will also ensure operational safety by raising alerts whenever it detects an unsafe scenario in the fleet due to technical failures or planning oversight by RAMP. As a hypothetical example, if vehicle batteries start to overheat due to a newly deployed research experiment studying rapid acceleration of e-scooters, the Fleet Controller will generate appropriate alerts before it becomes a significant risk. The RAMP will act as an interface between the Fleet Controller and researchers using ScooterLab. It will feature a semi-automated supervision module that will filter and prioritize proposed research experiments before deployment, and a sustainability estimation engine to determine the econometric impact of proposed research experiments on the testbed.
Testing and Deployment: We will follow an agile development and testing model for software components. In other words, new functions and features will be independently tested as their development is completed. Testing of each function and feature will be conducted in two stages: first through a set of regression tests, and then in a limited deployment fashion (such as by the PIs and developers involved). Functions and features that pass both the test stages will be deployed in the testbed.
Planning & Operational Logistics
Ongoing management of the ScooterLab testbed will require space for development of the equipment, real-world deployment of vehicles, in addition to operations, risk management, and maintenance. Deployment space, defined as the maximum area allowable by any studies as part of this testbed, includes all of the UTSA Main and Downtown campuses, plus adjacent apartment complexes and shopping destinations and the connecting rights-of-way, owned by the City of San Antonio (CoSA) and Texas Department of Transportation (TxDOT). This space is needed to enable the evaluation of real-world micromobility trips averaging 1.3 miles (1.6 St. Dev.), which include destinations for work, shopping, social/recreation, and home. The research team has already initiated conversations with appropriate stakeholders, including UTSA Office of Facilities, CoSA Transportation & Capital Improvements, Center City Development Office, and TxDOT San Antonio District Office.
ScooterLab will coordinate with the UTSA Risk Management office to include any applicable general liability insurance and performance bond required by the property and right-of-way owners within the geofenced deployment area, similar to commercial vendors' relationship with cities. Consistent with existing regulations of human subjects research, any study involving human subjects and/or personally identifiable information will go through the UTSA Institutional Review Board (IRB) before commencing research. Coordination of research studies will be set on a semester basis by (i) an open, online application for testbed research partnerships with transparent criteria, (ii) evaluation of applications by an operation board made up of the ScooterLab PIs and one UTSA student representative, (iii) scheduling resources and work needed to support micromobility studies, such as deployment geofencing and IRB applications. Maintenance includes both charging of e-scooters and return to the development space for periodic wear and tear repairs. UTSA student assistants will perform the majority of maintenance on testbed equipment. The testbed will include a cargo bike with a large, open, plastic box for the safe movement of e-scooters in the campus environment.
Datasets & Analytics Toolset
The ScooterLab testbed is expected to generate a high volume of real-time data, primarily consisting of sensor data and fleet parameters. ScooterLab will also correspondingly record and archive external variables not sensed within the testbed, such as real-time weather and traffic conditions from third-party online sources. The multi-modal data generated by the testbed will be stored in a fashion that will enable efficient multi-dimensional computations, such as applying data mining and deep-learning techniques. The final database schema will be developed during the planning phase, with input from the community of potential collaborators. Datasets generated from the experiments conducted on ScooterLab testbed will be published after the conclusion of each experiment. Datasets will be made available for download through a public web portal, where independent researchers can select and download the data they require to conduct their research. ScooterLab will also incorporate a suite of analytics tools within RAMP, that will enable researchers to conduct cloud-based analyses. Matured open-source big data analytics frameworks such as Apache Spark and Plotly already offer such suites of analytics tools, and one such framework (selected based on feedback from the community) will be integrated with RAMP and customized for ScooterLab datasets.