
ScooterLab is a programmable and participatory sensing research infrastructure that supports micromobility-focused data collection and experimentation in real-world settings.
Architecture Overview
ScooterLab has three core components: (1) the Wireless Base Station Computer (WBSC) on each e-scooter, (2) the Fleet Controller (FC), and (3) the Research Activities Management Portal (RAMP). Together, these components support customizable data collection projects, fleet operations, and researcher access to curated datasets and tools.
Quick start slides: For a fast overview of the platform and portal workflows, start with:
E-Scooters and WBSC (On-Vehicle Customizability)
The WBSC is built around a Raspberry Pi 4 (4GB) and supports multiple sensor interfaces through GPIO and USB. The base sensing stack includes Sense HAT V2 sensors (gyroscope, accelerometer, magnetometer, temperature, pressure, humidity, and light), plus GPS, camera, and microphone modules. The WBSC is designed to accept additional custom sensors for project-specific needs, which is a key part of ScooterLab's configurability. Trip data is buffered locally and uploaded to the FC when scooters are within UTSA Wi-Fi range.
The current fleet includes Segway G30 Max e-scooters, with planned expansion to support larger-scale studies.
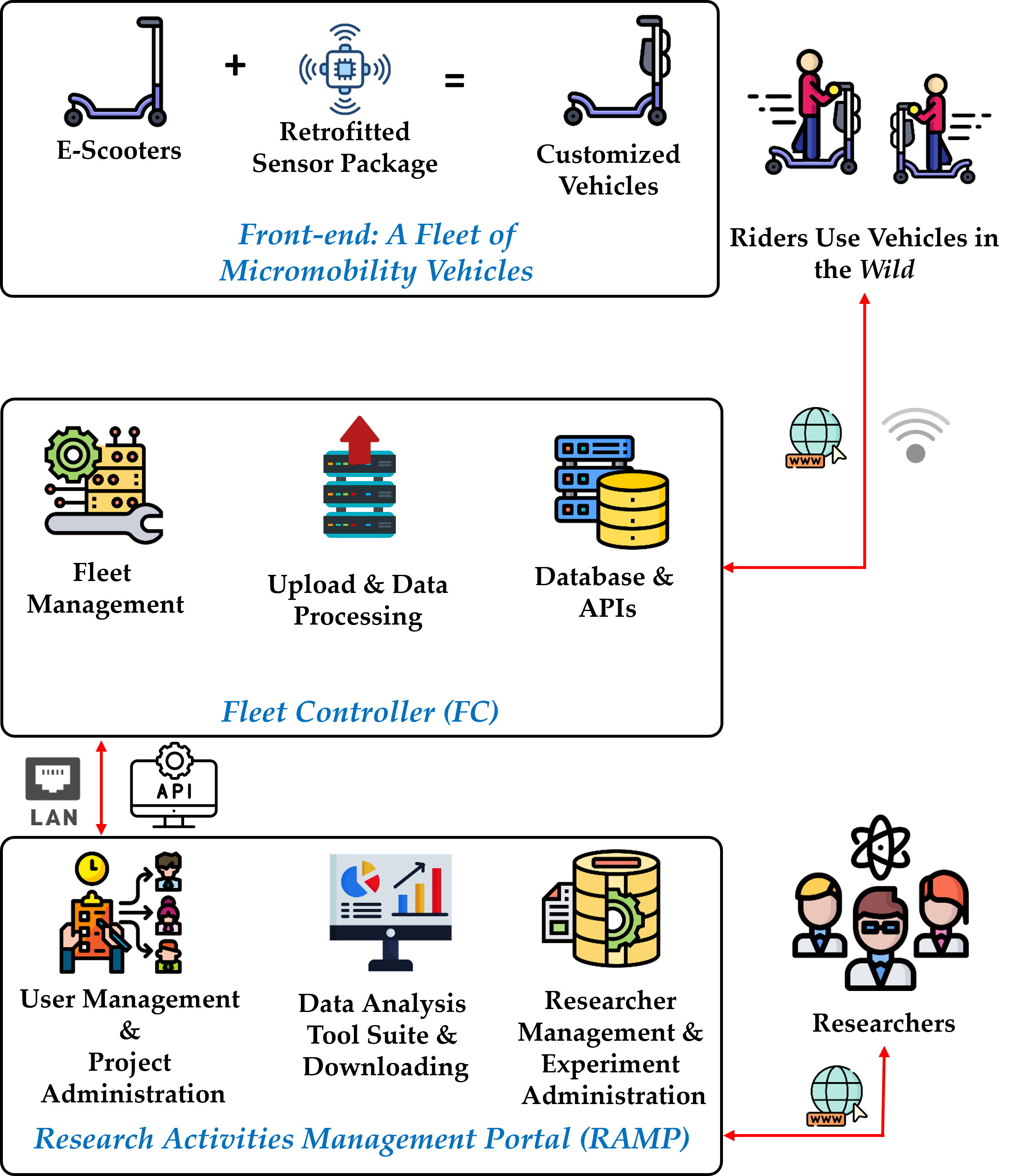
Fleet Controller (FC)
The FC is the central control and data hub. It provides three service groups: fleet management (including project-specific scooter configuration), upload/data processing, and database/API services for downstream retrieval through RAMP. The FC pipeline can integrate external context streams such as traffic and weather, and supports experiment-specific queries.
FC services run on high-capacity server infrastructure with Flask-based ingestion and API layers plus MySQL-backed data management.
Research Activities Management Portal (RAMP)
RAMP is the researcher-facing interface for project requests, tracking, analysis, visualization, and data export. RAMP includes three modules: user management, project management (including data collection policy, target geography, and schedule), and a tool suite.
The tool suite includes a Map tool (ArcGIS Maps SDK for JavaScript) and a Stats tool for tabular and chart-based views. The RAMP stack uses a Laravel 10 back-end, a MySQL user database, and JavaScript front-end interfaces running on dedicated compute infrastructure.
Operationalization and Research Access
ScooterLab operations include rider onboarding, check-out workflows, informed consent, safety training, and IRB-reviewed data collection procedures. Overall, the platform is an end-to-end, customizable infrastructure that supports real-world micromobility research workflows from project definition to curated dataset access.